
MIPS Modular Robotic Arm
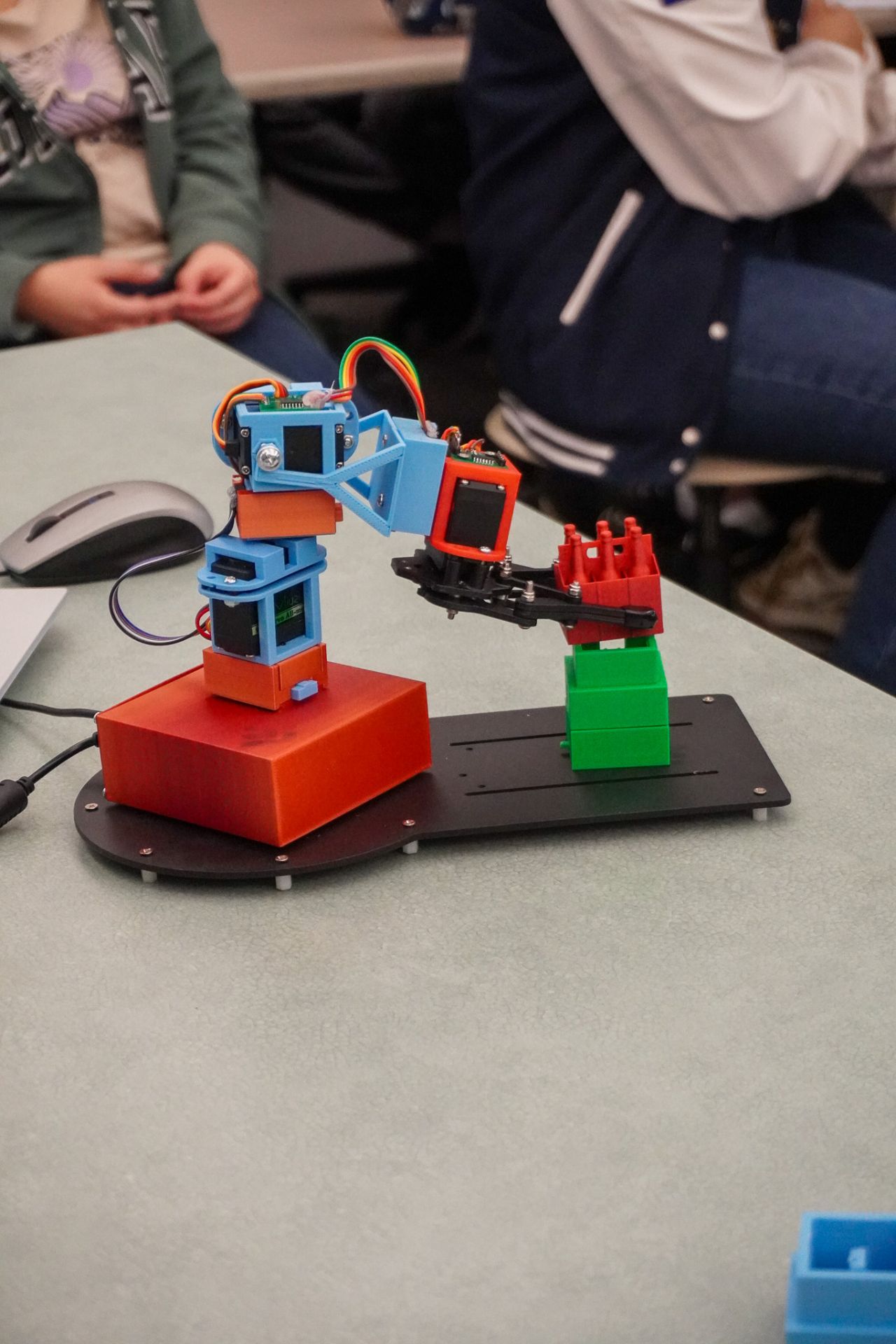
MIPS is a modular robotic arm platform developed to give students hands-on experience with robotics, embedded systems, and mechanical assembly. Each joint functions as a self-contained module with its own microcontroller, communicating over a custom serial bus to a central, swappable Arduino-based hub. The system was designed to reduce the fabrication barrier for students by enabling rapid assembly and iteration without soldering or advanced machining, allowing classroom time to focus on programming, system behavior, and engineering problem-solving.
Tags
Project Gallery
Project Highlights
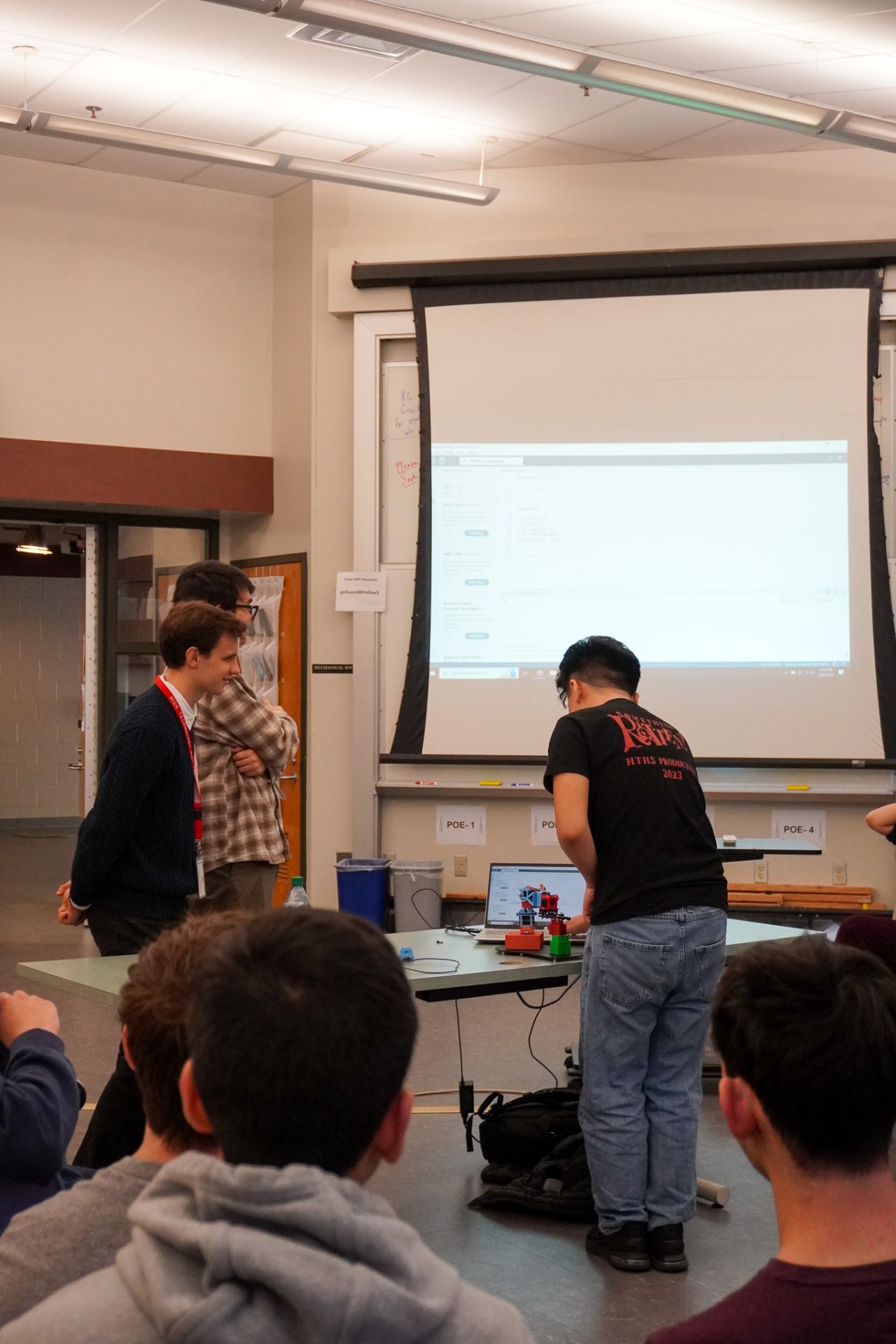
Classroom Deployment
Designed for repeated classroom use as a hands-on robotics learning platform.
Modular Joint Architecture
Each joint operates as a self-contained microcontroller-driven module.
Custom Communication Bus
A centralized control architecture allows modular expansion and simplified integration.
Low Barrier to Entry
Students can assemble and program functional robotic systems without soldering or advanced fabrication.