
Autonomous Dune Buggy
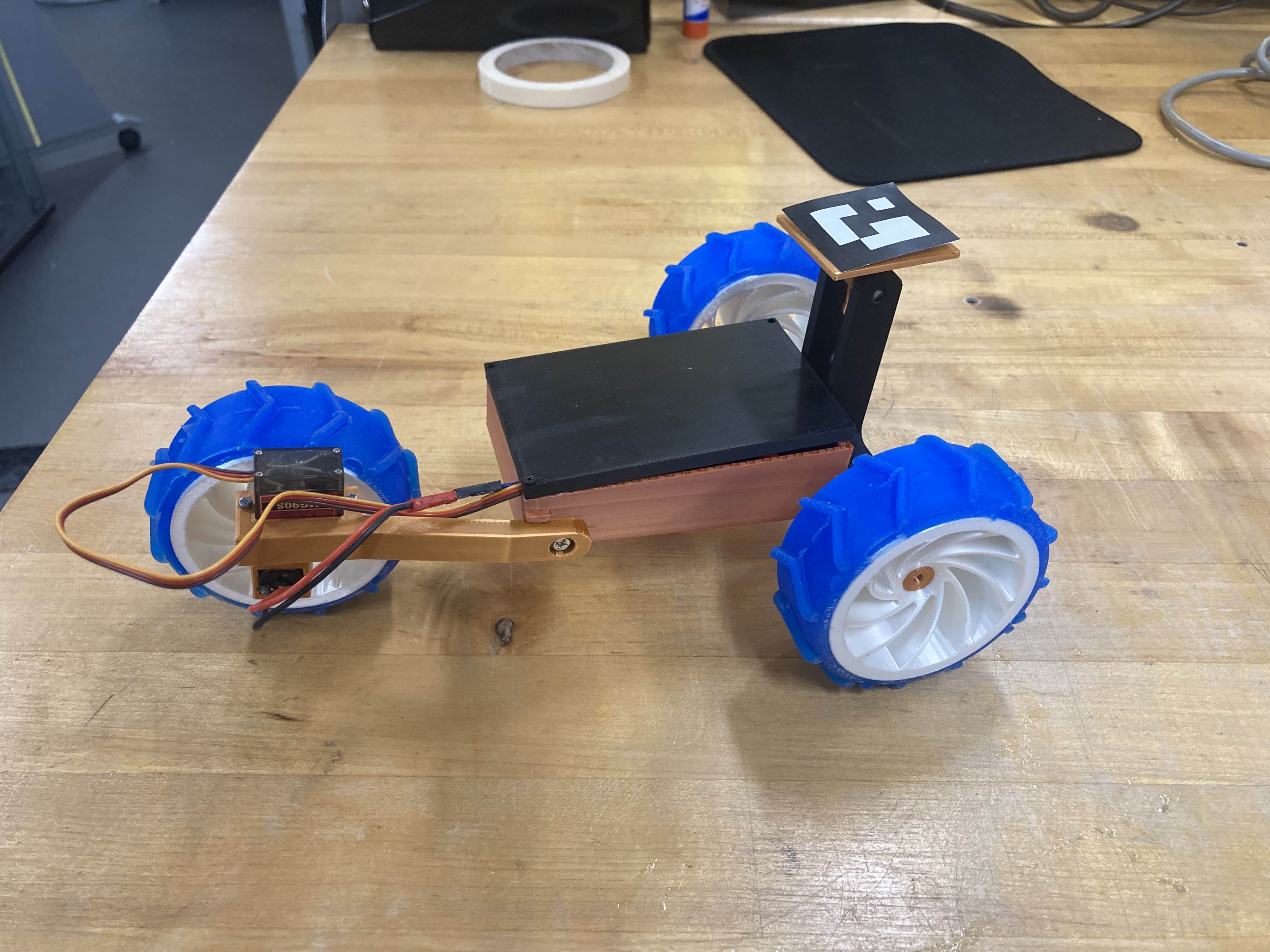
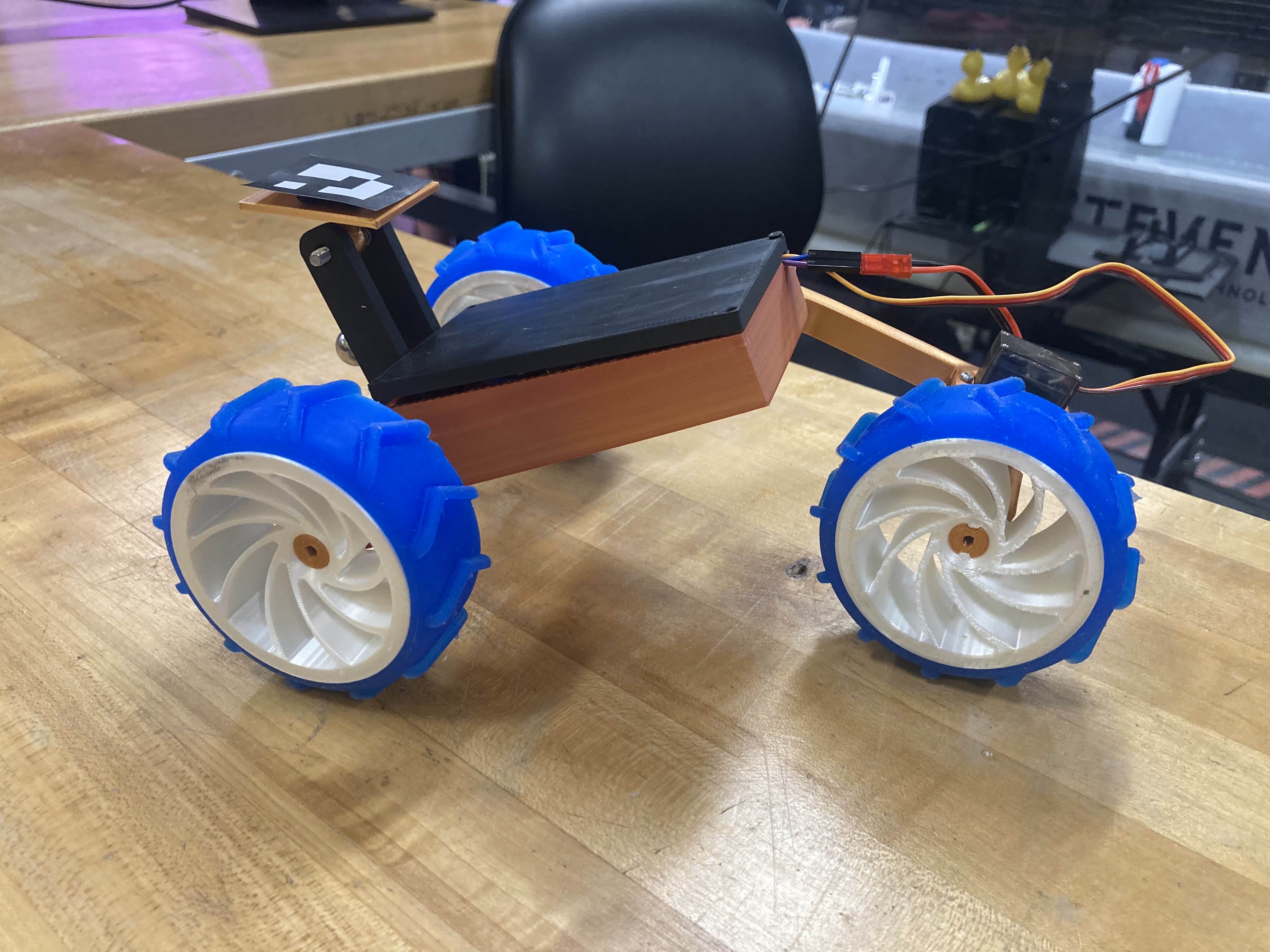
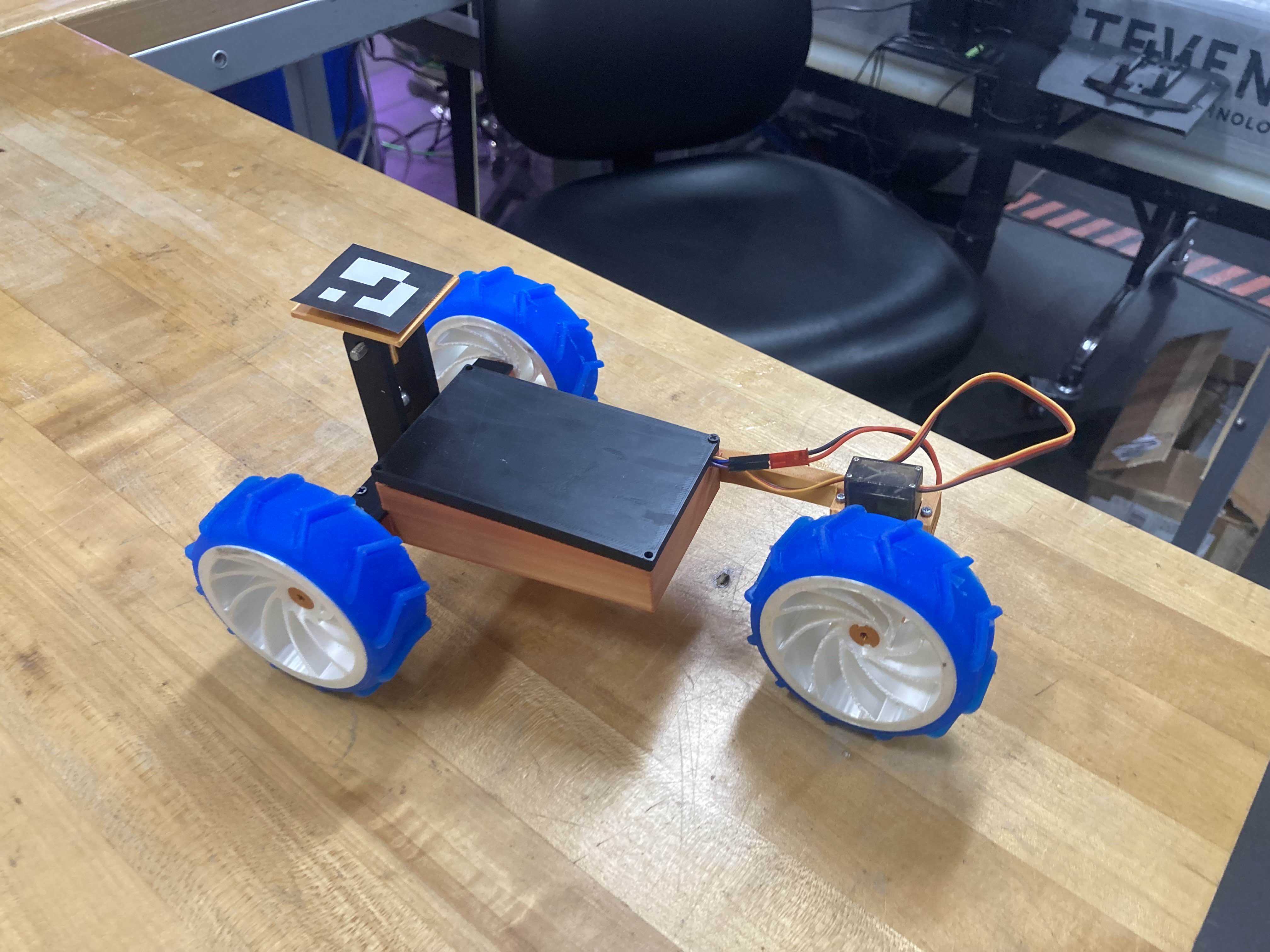
The Autonomous Dune Buggy is a three-wheeled robotic platform developed for operation on soft, uneven terrain. Its large rear wheels improve traction in sand, while a pivoting front caster helps the vehicle maintain mobility over changing surface conditions. A pendulum-mounted fiducial tracking system was incorporated to improve the stability of vision-based localization using OpenCV. Originally developed for a university freshman robotics curriculum, the platform demonstrates mechanical adaptation, sensor integration, and robust navigation in environments where conventional small robots struggle.
Tags
Project Gallery

Project Highlights
Soft Terrain Mobility
Rear wheel geometry was selected to improve performance on sand and other low-support surfaces.
Vision System Stability
A pendulum-mounted tracking marker helped maintain reliable camera visibility during motion.
Mechanical Adaptation
The front caster and overall layout were designed to handle uneven terrain more effectively than conventional classroom robots.
Educational Robotics Application
Developed as part of a hands-on teaching environment for robotics and autonomy.