
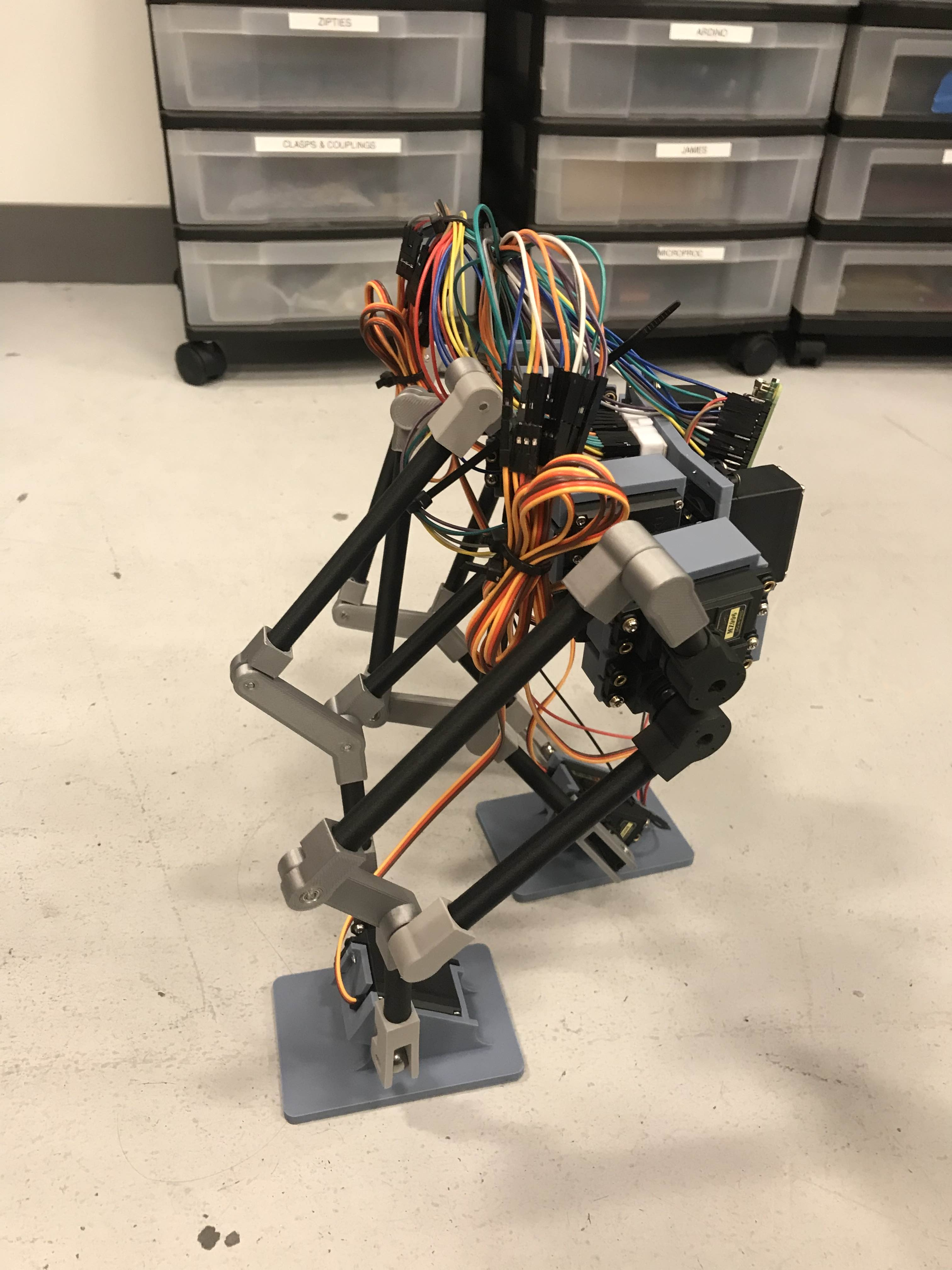
Hip-Driven Bipedal Walking Robot
Developed at the PROOF Lab, this bipedal robot was engineered to traverse uneven terrain while carrying significant loads. Its hip-centered actuation strategy drives the hip, knee, and ankle through a mechanical linkage system, reducing leg inertia while preserving load-bearing capability. Additional ankle degrees of freedom improved terrain adaptability, while finite element analysis informed the structural design of critical components for improved stiffness-to-weight performance. The resulting prototype was developed and presented within a university research environment focused on advanced robotic mobility.
Tags
Project Gallery

Project Highlights
Hip-Centered Actuation
A linkage-driven architecture reduced distal leg inertia while supporting load-bearing locomotion.
Uneven Terrain Capability
Additional ankle degrees of freedom improved adaptability across irregular surfaces.
FEA-Informed Structure
Key structural components were optimized for strength and weight using finite element analysis.
Research Development Environment
Designed, prototyped, and reviewed within a university robotics lab setting.